三次元距離測定に最適なTOFセンサモジュール
高い外乱光耐性で組み込みが自由自在
-
開発者向け
3D Time of Flight
センサモジュール形B5L
-
相互干渉防止機能
- 複数のTOFセンサを対向または並列に配置すると、他方のTOFセンサの影響を受けて、出力が不安定になる場合があります(相互干渉)。これを防止する機能として、相互干渉防止機能を搭載しています。(最大17台)
- LED投光周波数IDを異なるIDに変更する事で防止可能です。詳細はユーザーズマニュアルをご覧ください(マニュアル番号 CEWP-105)
▶ ぜひ、動画でご覧ください
-
ID変更方法 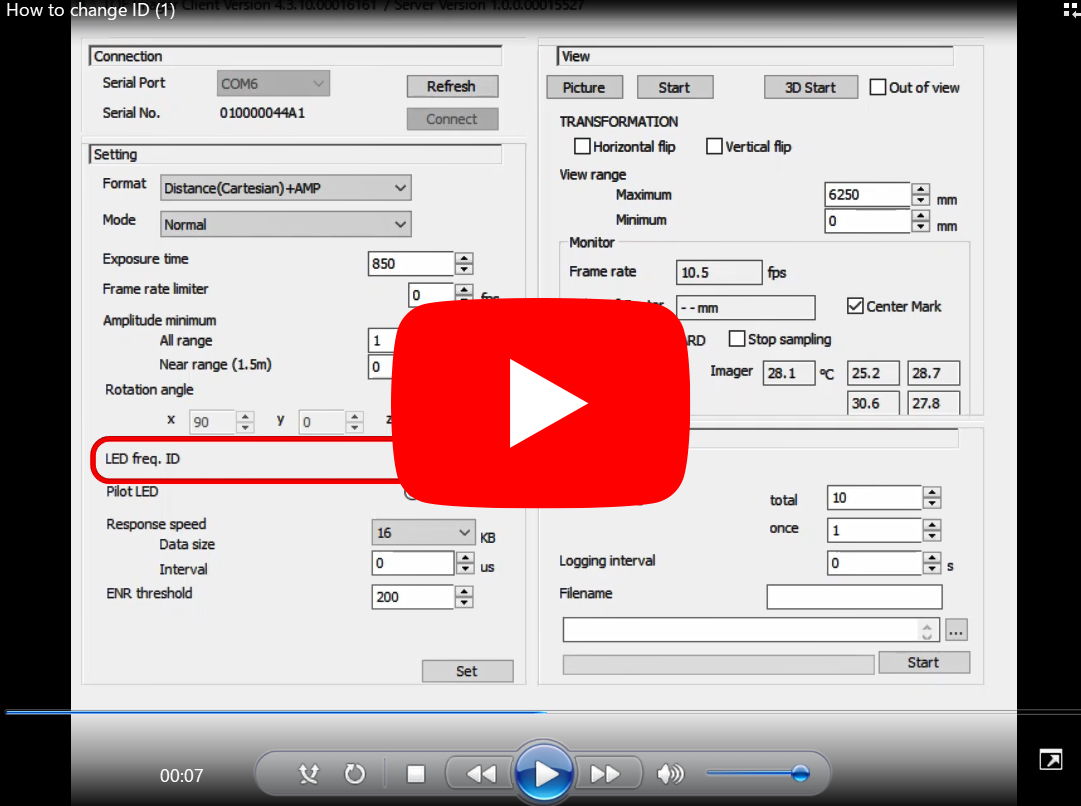
-
相互干渉事例 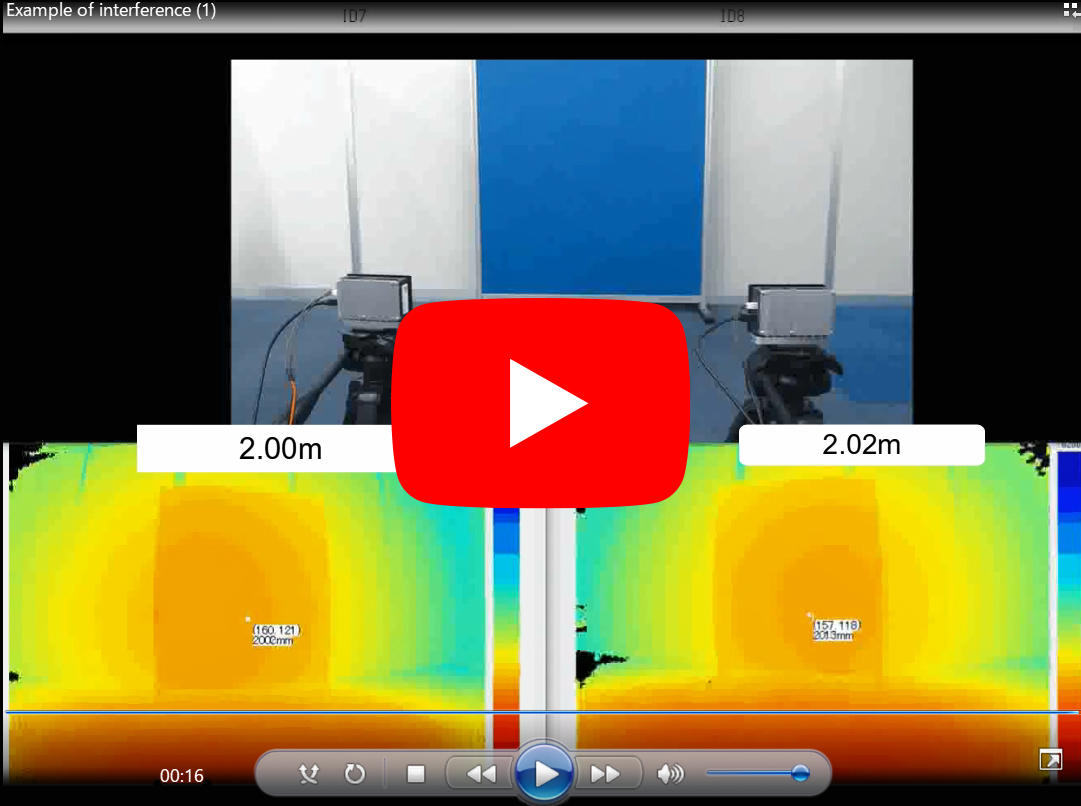
HDR機能
HDR(High Dynamic Range)機能を標準搭載。
露光時間を変えて測距した2つのデータを重ね合わせていますので、広範囲の撮影に適しています。
ある一定距離で測定する場合は、 HDRをOffした高速モードも設定可能です。
-
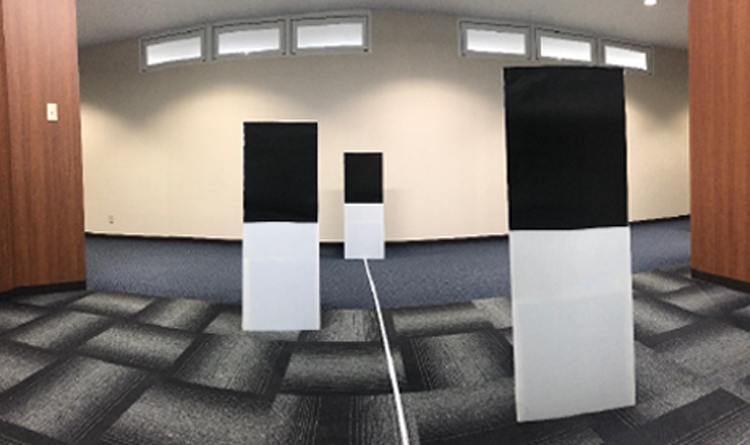
RGBカメラ撮影画像・パネルまでの距離は
1m/2m/4m
・壁までの距離は5m -
高速モード
-
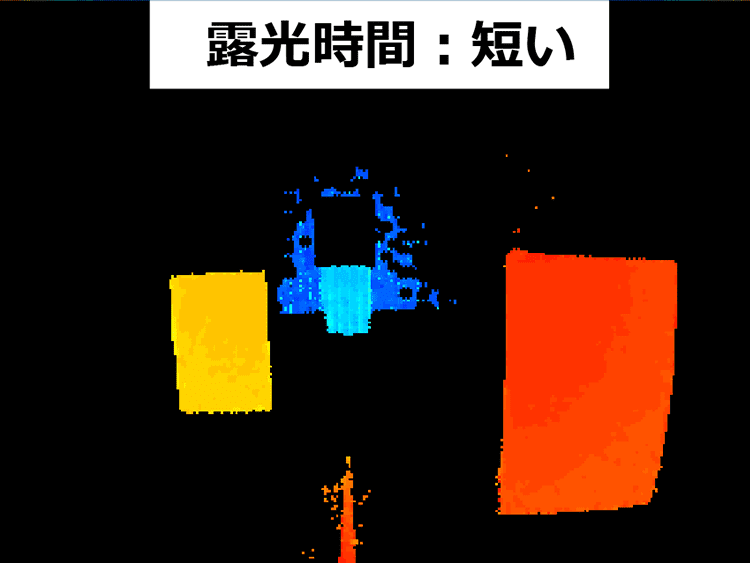
受光量が小さいと黒色や遠距離の測定ができないまたは距離誤差が大きくなる -

-
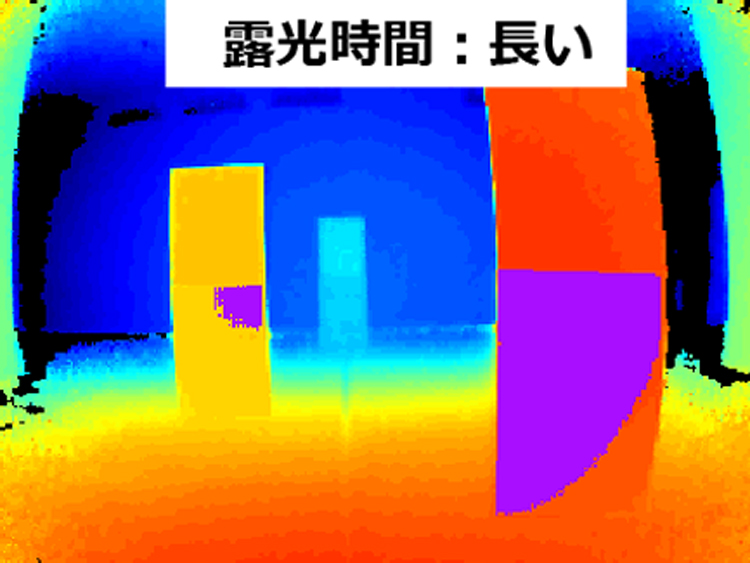
受光量が大きいと白色や近距離の測定ができない

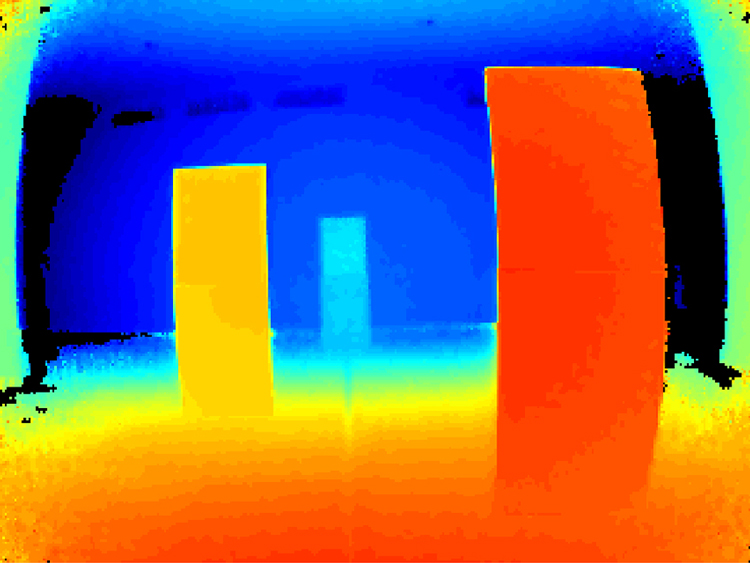
距離の遠近、色の濃淡など幅広い範囲の測距可能 -
3D 変換機能
- 極座標(r、θ、φ)と直交座標(x,y,z)の出力選択が可能。システム側での座標変換の処理が不要です。
-
直交座標形式 -
直交座標回転形式 -
極座標形式
| デ一タ名称 | 説明 |
|---|---|
| 距離デ一タ | 本製品の座標原点から対象物までの3次元の距離を示します。 |
| 距離デ一タ 直交座標形式 | Xo,Yo,Zo:座標原点を原点としたXYZ座標 |
| 距離デ一タ 直交座標回転形式 | Xr,Yr,Zr:コマンド設定した角度分、Xo,Yo,Zo軸回りで回転させた直交座標 |
| 距離デ一タ 極座標形式 | r、θ、φ:直交座標を基準とした極座標 |
| 振幅デ一タ | LEDを発光させたときの各pixelの受光感度 16ビット(譜調256) |
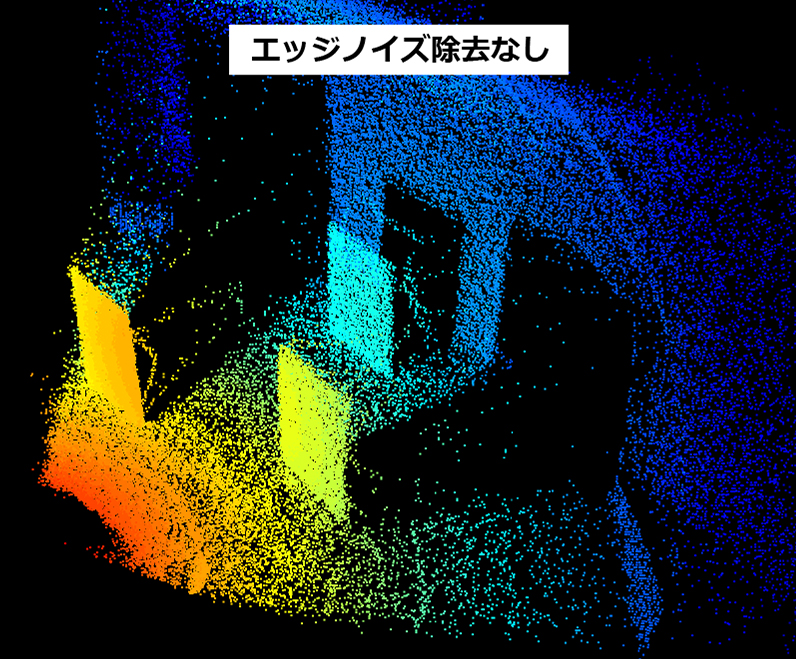
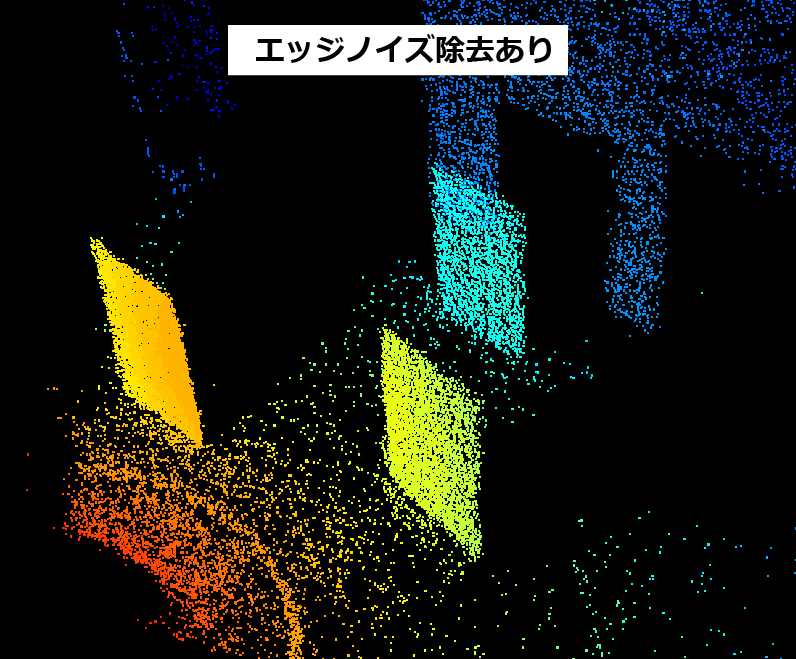
エッジノイズ機能
-
-
検出したい物体と背景に距離差がある場合
物体の周囲の距離データが背景との距離の中間的な数値になります。このため、検出物体の周囲のデータを除去することができます- 距離差がしきい値以上となる画素を境界(エッジ)として判定し、遠い方の画素の距離・振幅値を低振幅(非表示)として出力する機能です。
- しきい値を下げるとエッジとして判定されやすくなりますが、ピクセル間の距離バラつきが大きい状況で誤判定が増加します。
Order Informationご購入/お問い合わせ
種類
scroll
| 検出方式 | 検出範囲(白紙) | NIR透過フィルタ | 形式 | 最終納入単位 |
|---|---|---|---|---|
| TOF |  |
あり(内蔵) | 形B5L-A2S-U01-010 | 1個 |
オンライン購入
本製品のご購入・ご質問は、以下よりお問い合わせください。




ご質問・お問い合わせはこちら