光センシング
光の波と粒子の性質を捉え、物体の有無、距離、変位などを高精度に測定する技術
特長
光学設計技術
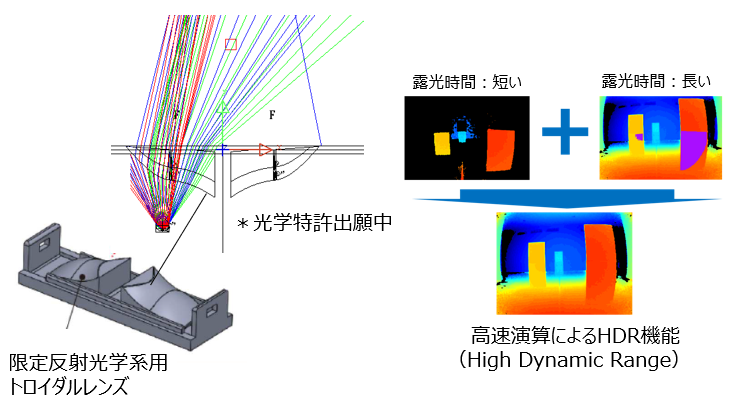
限定反射光学系では、4種類のトロイダルレンズを組み合わせた光学シミュレーションを行い、黒や透明などのわずかな反射光でも安定検出が可能な光学系を実現
高精度演算技術
光センサの信号に、独自の回路処理、アルゴリズムを駆使し、高精度化、多機能処理を実現
技術詳細
黒・透明・鏡面も安定検出可能な限定反射光学系(光学設計技術)
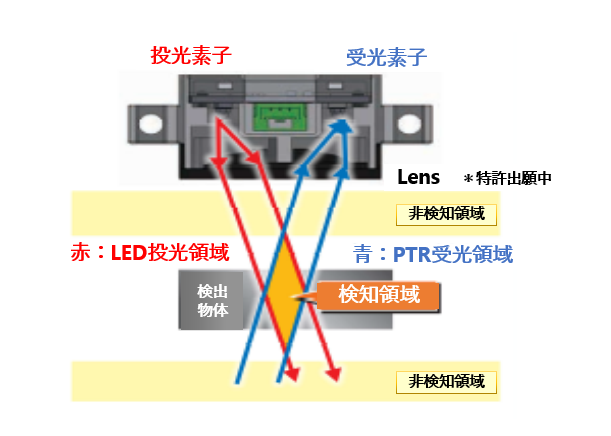
光学設計技術により、投光ビームと受光エリアを限定した光学系を実現。センサから一定距離(投光ビームと受光エリアが重なった領域)にある対象物だけ検出します。
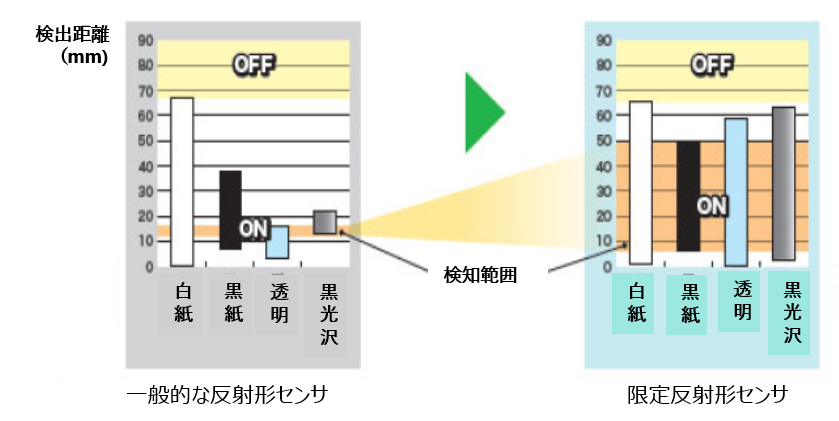
一般的な反射型センサでは検出が難しい黒、透明、光沢(鏡面)の物体でも、限定反射型センサでは安定して検出が可能です。
演算回路と組込みソフトによる3D出力(高精度演算技術)
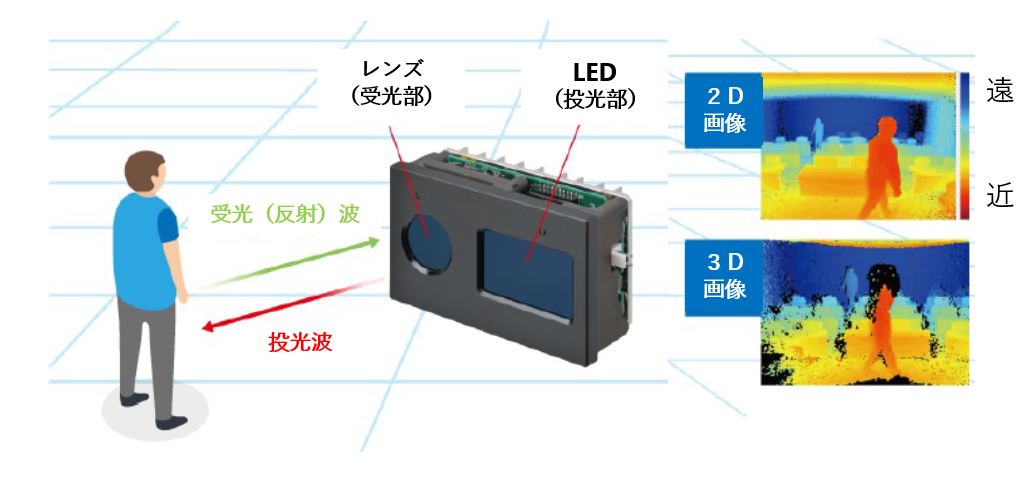
TOF※1センサでは、光の飛行時間を計測することで、対象物の距離計測を行います。320×240画素※2各点の距離を計測し、3D表示が可能です。
※1 TOF = Time of Flight
※2 画角により測距できない画素が生じます。
演算処理による高精度化(高精度演算技術)
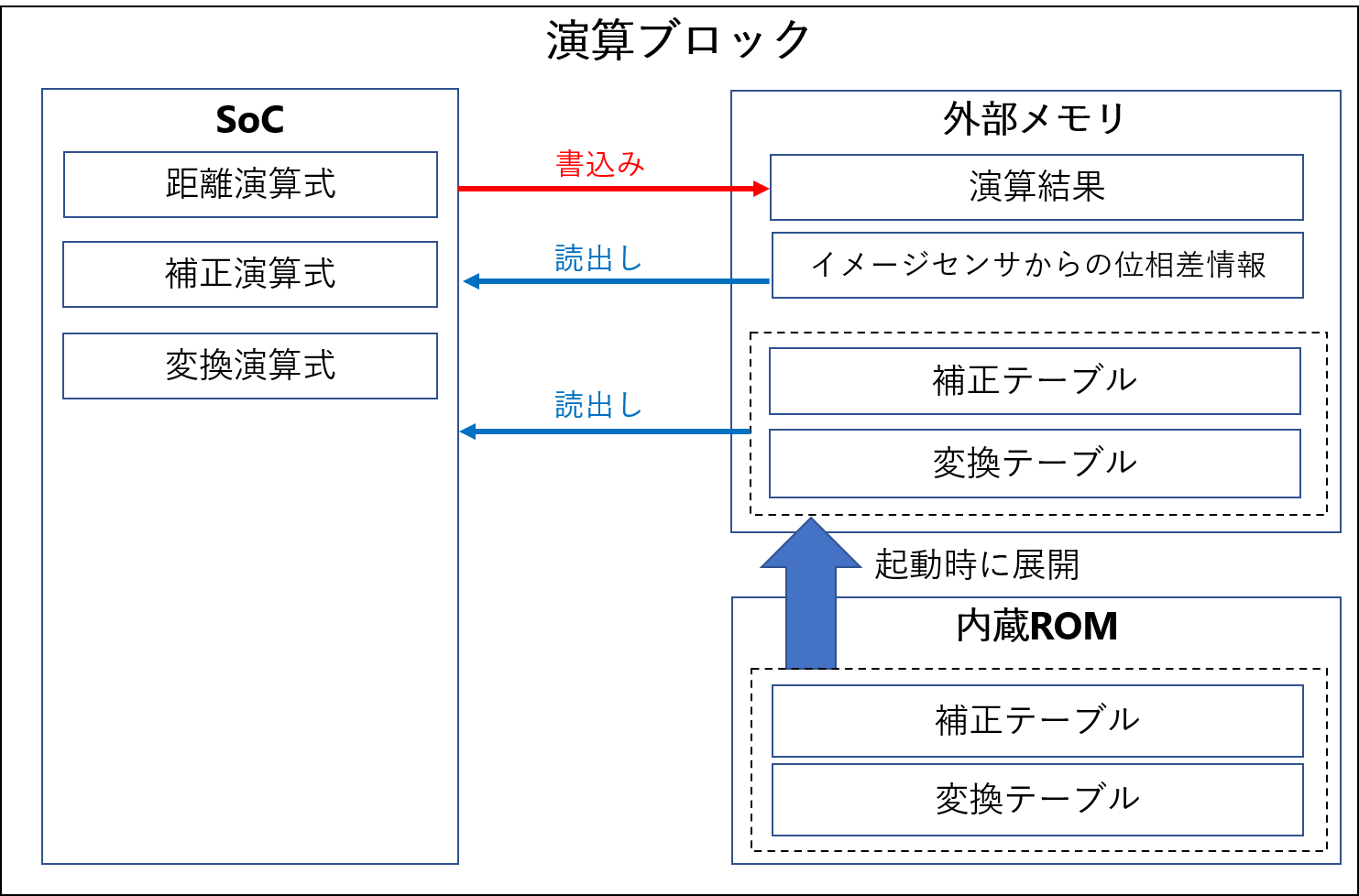
スマートサイジングにより、プロセッサを搭載し、イメージセンサや光学系のバラツキ、周囲温度の影響などを補正、±2%(2m)の距離精度を実現しています。
アプリケーション

透明体センシング
限定反射光学系により、従来検知が困難であった透明体を安定に検知。鏡面や黒色物体も安定に検知可能
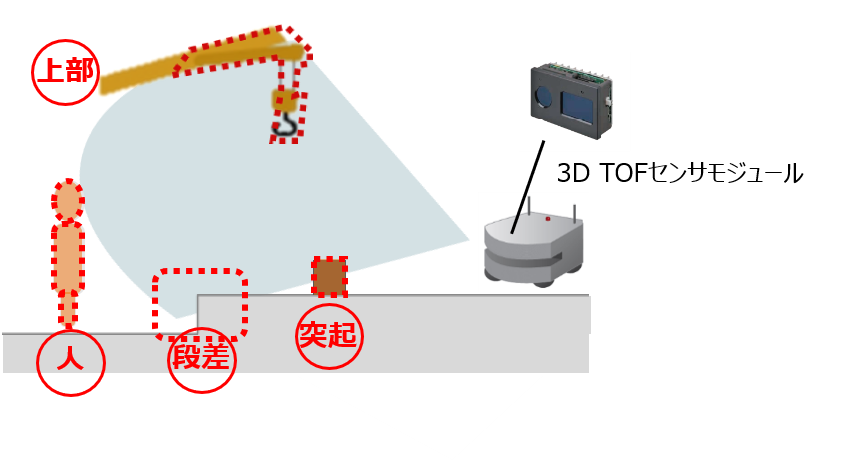
自律型ロボットの障害物検知
3次元空間を計測する距離画像センサ(3D TOFセンサ)により、ロボットの安全走行のための障害物を検知