-
事例02サービスロボット
進行方向にある障害物を三次元で距離計測
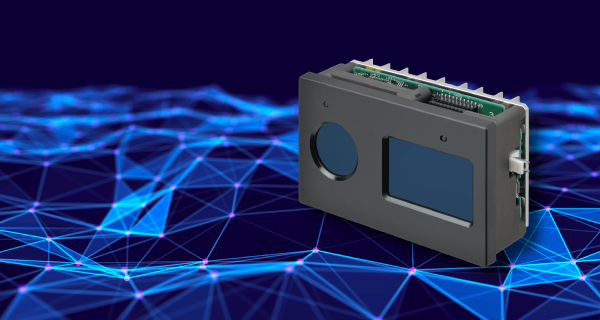
適応形式3D TOFセンサモジュール:形B5L-A2S-U01-010 -

 障害物・段差の検知
障害物・段差の検知
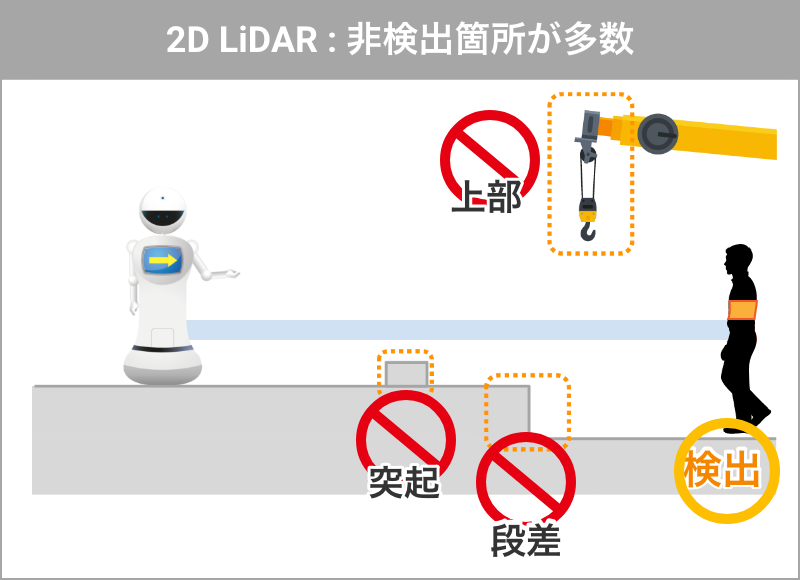
サービスロボットの障害物検知用途では、従来2D LIDAR、光センサ、超音波センサなどが採用されています。
しかし、いずれも計測エリアが限定的なため、障害物・段差検知が不十分で衝突・落下のリスクがあります。
- 2D LIDARの場合
- 二次元計測のため、上方に固定された障害物や下方の床段差などが検知できません。
- 超音波センサの場合
- 検出エリアが狭い。
- 光変位センサの場合
- 検出エリアが狭い。
- 近距離では高反射率物体による信号の飽和、遠距離では低反射率物体による信号の微弱で検出できません。
- 屋内でも窓越しに入光する太陽光により、距離データの精度が低下します。
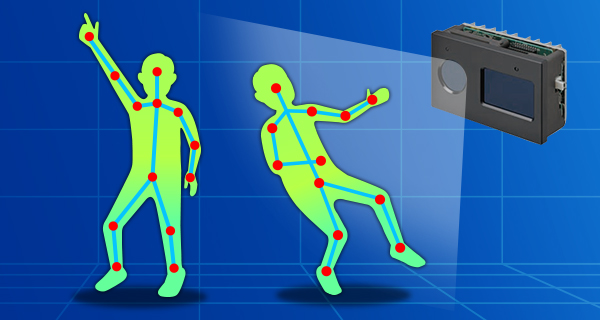
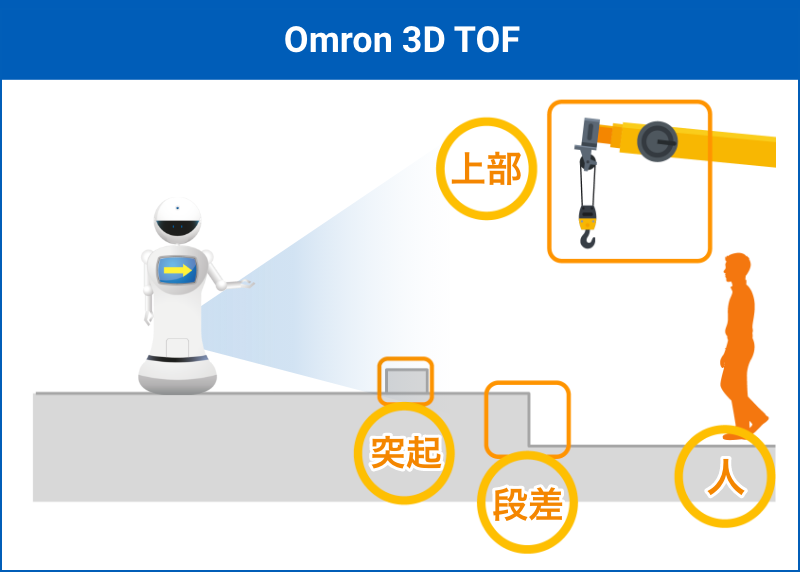
 三次元距離計測による障害物や段差検知で、衝突や転落の防止に貢献
三次元距離計測による障害物や段差検知で、衝突や転落の防止に貢献
- 本センサはTime Of Flight方式で三次元距離計測が可能です。
三次元の距離データにより、上下・左右の広い範囲で障害物や段差を安定検知し、サービスロボットの衝突防止に貢献します。
その他のアプリケーション例
-
AMR
サービスロボット
-
室内の人数カウント
介護・見守り