
形 B5L 3D TOFセンサモジュール
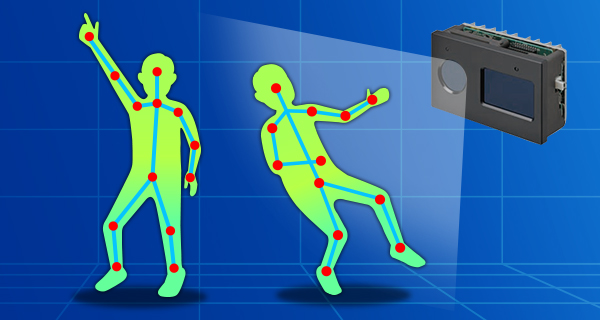
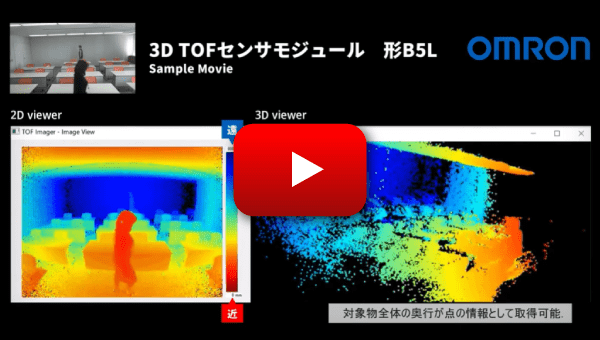
人や物体との距離を
3Dでリアルタイムにセンシング
- 耐太陽光100,000lx相当に対応し、明るい場所でも測定可能。*1
- 補正済みの信号を出力±2%(2m)の高精度を実現。*2
- 独自の回路設計と放熱設計により、連続駆動 約5年の長寿命を実現。*3
- 相互干渉防止機能付き*4
*1. 製品仕様の精度を保証するものではありません。
*2. 当社評価方法による
*3. 周囲温度:20℃/湿度:65%RHを基準にした信頼性加速試験結果であり、製品保証期間ではありません。
*4. コマンドにより最大17通りのID設定が可能
本機能稼働時はID=8(デフォルト)以外については製品仕様の精度を保証するものではありません。

DOWNLOADダウンロード
本ページは製品カタログからの抜粋した情報を記載しています。その他の製品情報はデータシート他各種データをご覧ください。CADデータがある形式は「形式一覧」よりご確認いただけます。
カタログ
| データ種別 | ファイル名 | 更新日 |
|---|---|---|
| データシート | データシート B5L | |
| セレクションガイド | センサセレクションガイド | |
| カタログ | 3D TOFセンサモジュール 形B5L |
操作マニュアル/ソフトウェア
| データ種別 | ファイル名 | 更新日 |
|---|---|---|
| ユーザーズマニュアル | 3D TOF センサモジュール 形 B5L ユーザーズマニュアル 会員専用 | |
| ユーザーズマニュアル | 3D TOF センサモジュール 形 B5L カンタン設定マニュアル | |
| ソフトウェア | 形B5L用ソフトウェア ダウンロード使用許諾 | |
| サンプルコード | Sample codes download from GitHub. |
*ソフトウェアをダウンロードいただくには、本製品の使用許諾契約への同意が必要です。
MODEL LIST形式一覧
それぞれの形式に関する情報を掲載しております。CADデータはログイン/会員登録いただくとダウンロードすることができます。
| 形式 | SamacSys3D/ECAD*1 | Ultra Librarian3D/ECAD*2 | OMRON2D/3D CAD*3 | 購入 | Rohs証明書*4 | 生産状況 |
|---|---|---|---|---|---|---|
| B5L-A2S-U01-010 | ログイン/会員登録 | ログイン/会員登録 | Download | 生産中 |
- *1外部サイト(SamacSys)が新しいウィンドウで開きます。
3D CADならびにECADデータは当社提供情報をもとにSamacSysが独自に制作したものであり、当社は3D CADならびにECADデータの正確性、最新性および完全性を保証いたしません。 - *2外部サイト(Ultra Librarian)が新しいウィンドウで開きます。
3D CADならびにECADデータは当社提供情報をもとにUltra Librarianが独自に制作したものであり、当社は3D CADならびにECADデータの正確性、最新性および完全性を保証いたしません。 - *32D,3D CADデータの仕様に関してはこちらをご覧ください。
- *4Rohs証明書は掲載されていない場合がございます。
掲載されていない商品については、弊社営業部門もしくは販売店へお問い合わせください。