-
Case 02Service Robot
Three-dimensional distance measurement of obstacles in the direction of travel
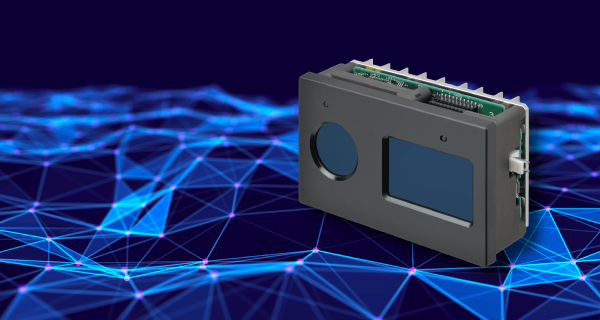
Suitable model3D TOF sensor module: B5L-A2S-U01-010 -

 Obstacle/step detection
Obstacle/step detection
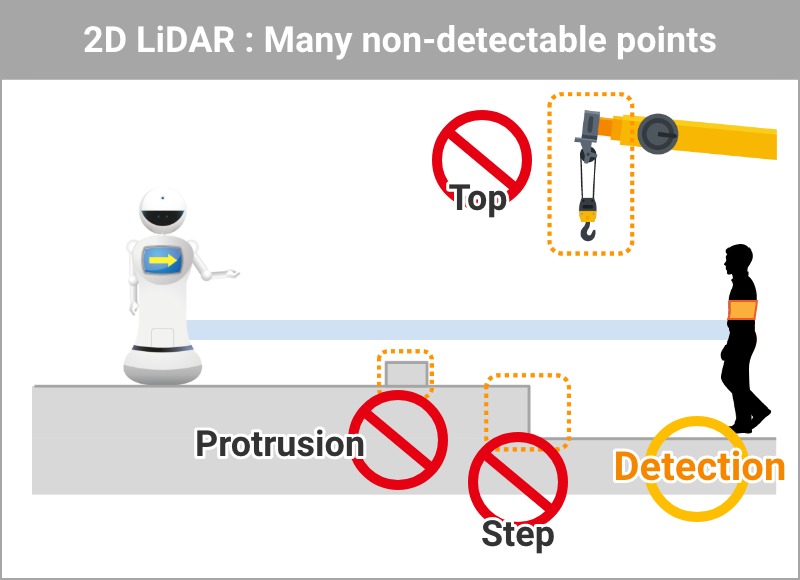
Conventional 2D LIDAR, optical, and ultrasonic sensors are used for service robot obstacle detection applications.
All of them, however, have a limited measurement area, with a risk of collision or fall due to insufficient obstacle and/or step detection.
- For 2D LIDAR
- Two-dimensional measurements cannot detect obstacles fixed above or floor steps below.
- For ultrasonic sensor
- Small detection area.
- For optical displacement sensor
- Small detection area.
- It cannot detect high-reflectance objects at short distances due to signal saturation and low-reflectance objects at long distances due to weak signals.
- Even indoors, the accuracy of distance data deteriorates by sunlight enters through a window.
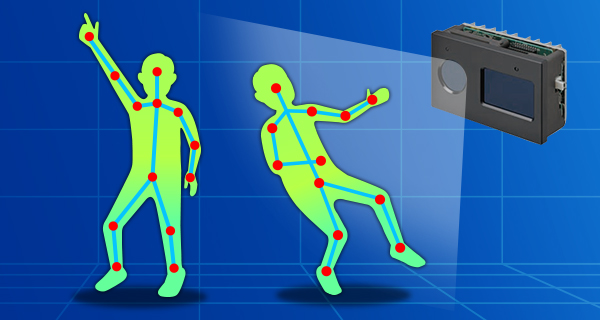
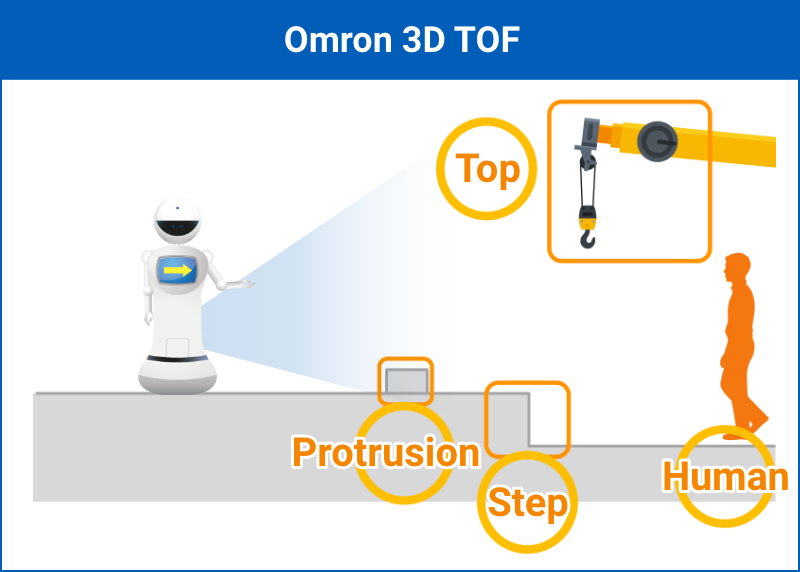
 Obstacle and step detection by 3D distance measurement contributes to collision and fall prevention
Obstacle and step detection by 3D distance measurement contributes to collision and fall prevention
- This sensor can measure three-dimensional distances using the time-of-flight method.
Three-dimensional distance data enables stable detection of obstacles and steps in a wide range of up/down and left/right directions, contributing to service robot collision prevention.
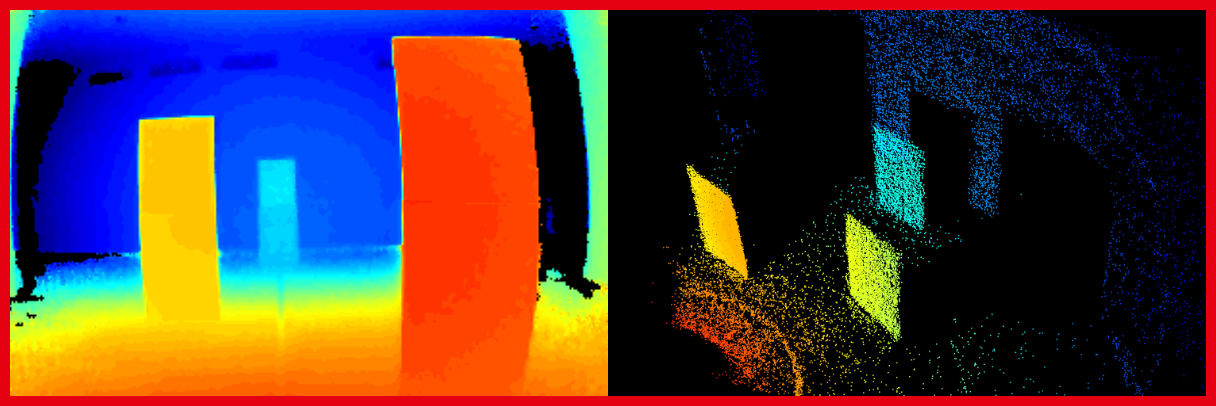
- Specialized processing (HDR function*) enables distance measurement of detection objects with low to high reflectance from near to far distances.
 * What is HDR function?
* What is HDR function? - Even indoors, sensors may be affected by sunlight shining through a window. This sensor has enhanced sunlight resistance* and can be used safely up to 100,000 lux.
* What is disturbance resistance?
Other application examples
-
AMR
Service Robot
-
Counting the number of people in the room
Care and Monitoring