TOF Sensor Module ideal for 3D distance measurement High ambient light immunity and flexible assembly.
-
For Developers
3D Time of Flight
Sensor ModuleB5L
-
Interference Prevention
- If multiple TOF sensors are placed facing each other or in parallel, the output may become unstable due to the influence of the other TOF sensors (mutual interference). Omron’s TOF sensor has software functions to prevent signal interference (maximum 17 units).
- Signal interference is prevented by changing the LED emission frequency ID to a different ID. For details, see the user’s manual (Manual No.E596-E1)
-
Interference Prevention ID Setting 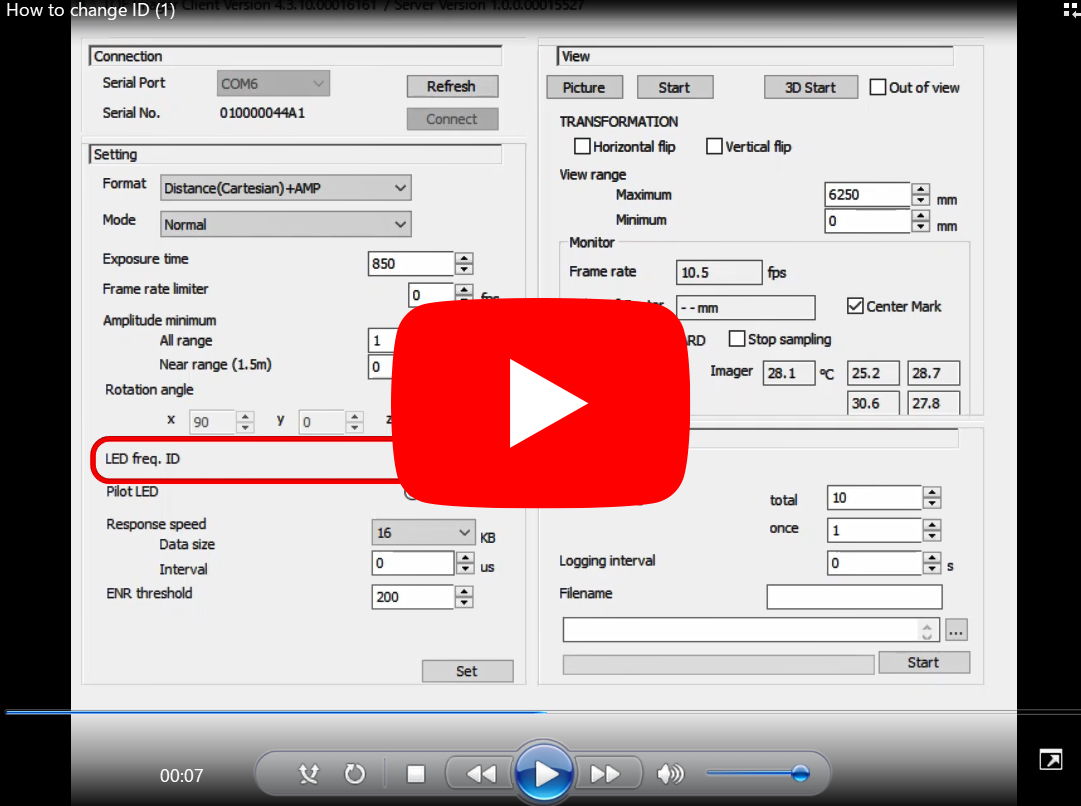
-
Interference Prevention Example 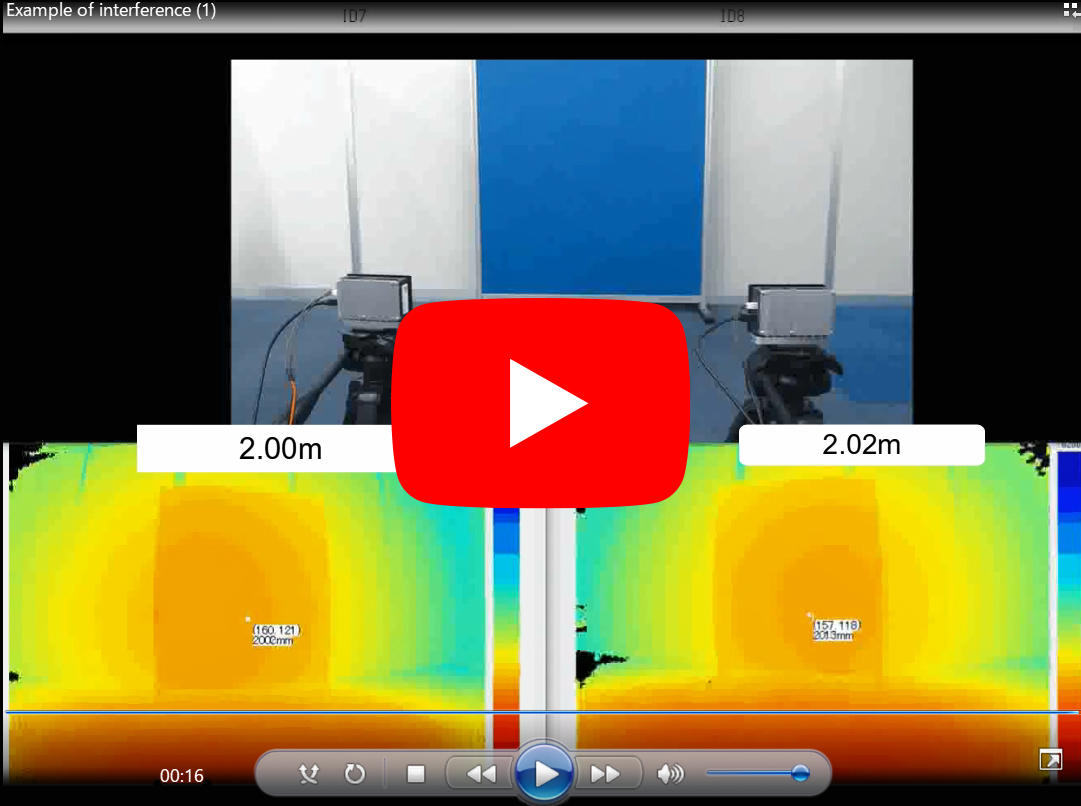
High Dynamic Range
HDR (High Dynamic Range) function is installed standard in the sensor The process works by measuring data points at two different exposure times, allowing for a complete view..
When measuring at a certain distance, the HDR function may be turned off if the customer desires to save processing power.
-
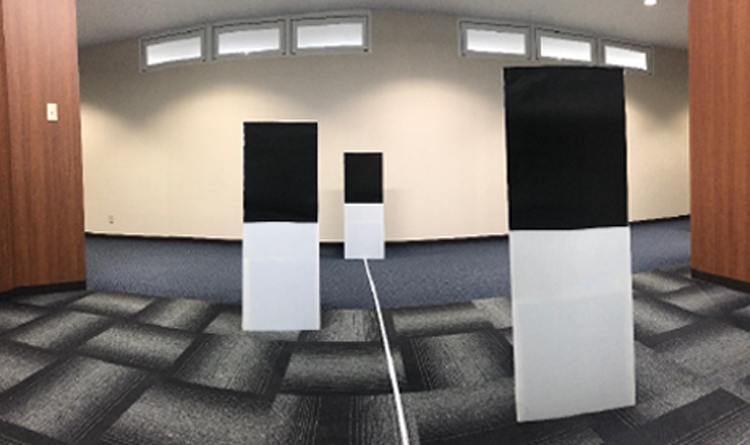
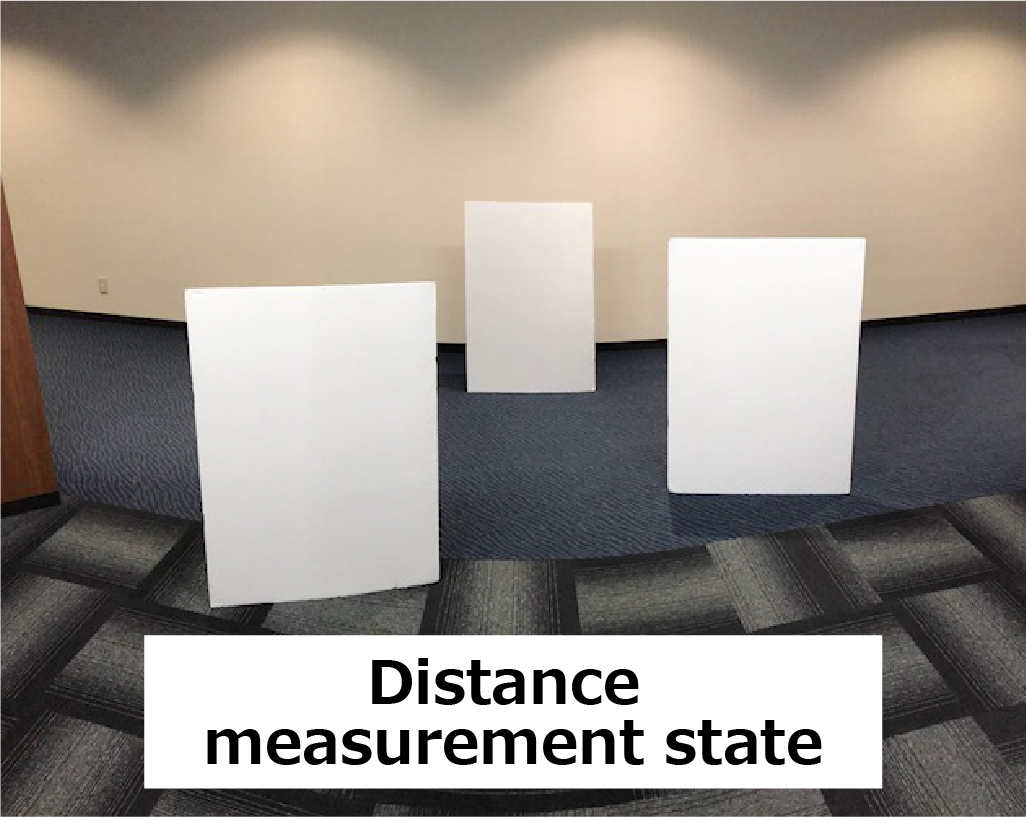
RGB camera shoot image
・The distance to the panel 1m/2m/3m・The distance to the wall is 5m -
High-speed Mode
-
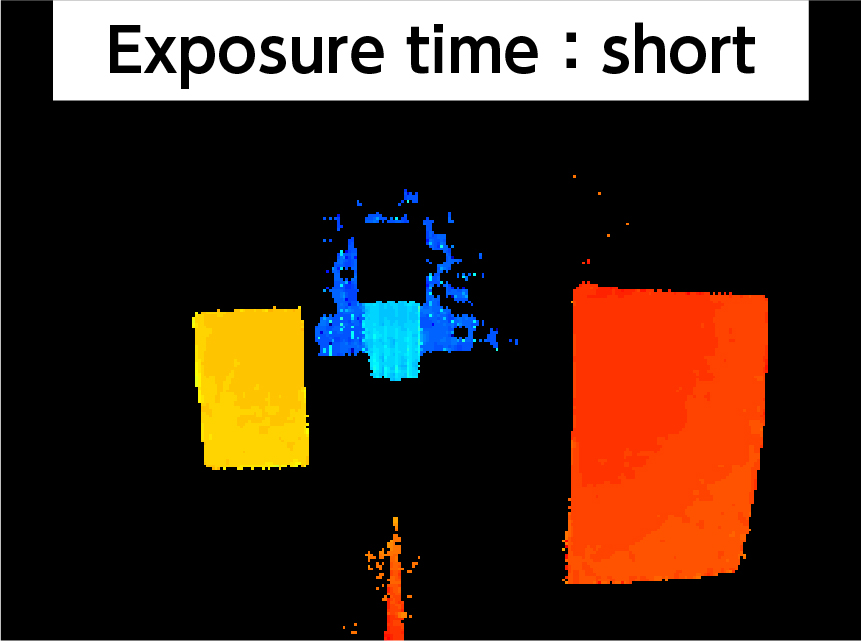
When the amount of light received is small, the TOF sensor loses its ability to detect black or long distance objects -

-
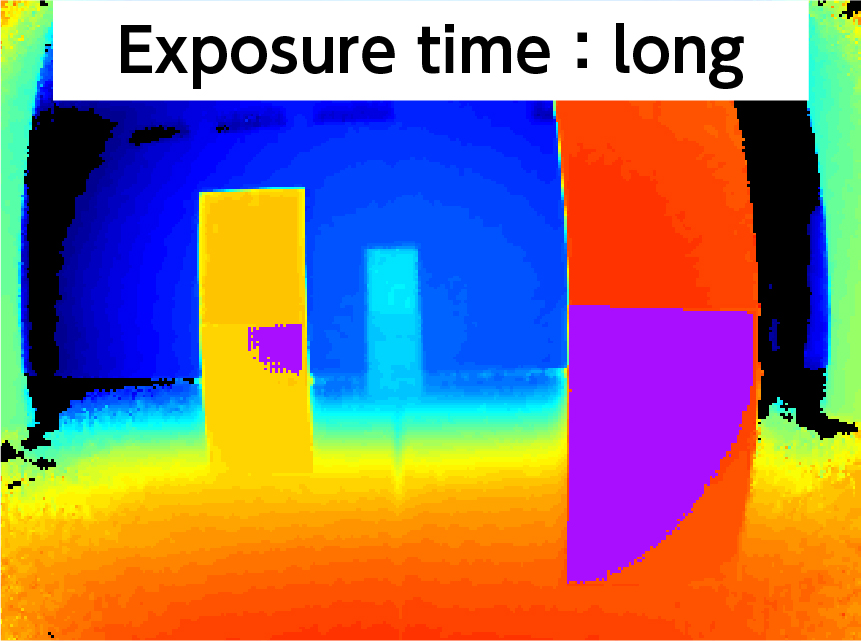
When the amount of light received is large, it cannot measure white or short distance objects.
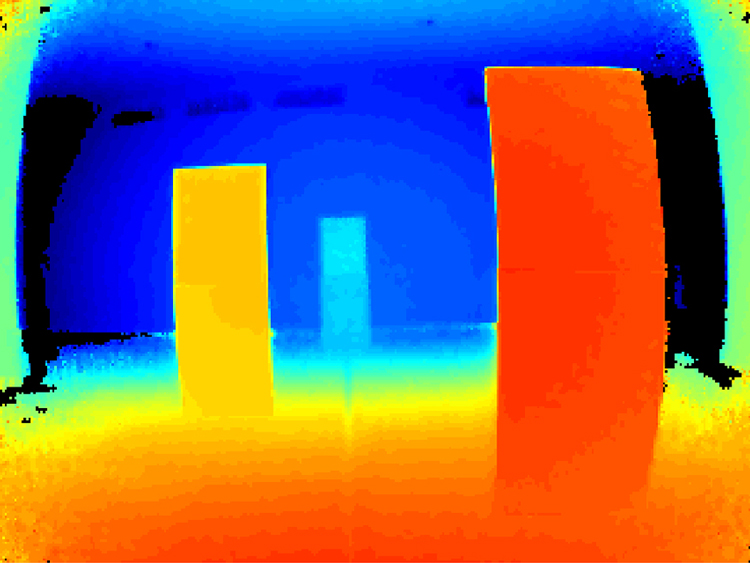
A wide range of distance measurements are possible, such as distance perspective and color shade. -
3D Conversion
- Output selection of polar coordinates (r,θ,φ)and Cartesian coordinates (x,y,z) is possible. There is no need to process coordinate conversions on the system side.
-
Cartesian -
Rotated Cartesian -
Polar
| Data name | Description |
|---|---|
| Distance data | The three-dimensional distance from the coordinate origin of this product to the object. |
| Distance data in Cartesian coordinate system | Xo, Yo, Zo: X, Y, and Z coordinates based on the origin coordinate as its origin |
| Distance data in rotated Cartesian coordinate system | Xr Yr, Zr: Cartesian coordinate system rotated around Xo, Yo, and Zo axes by the angle specified by the command |
| Distance data in polar coordinate system | r,θ,φ: Polar coordinate system based on the Cartesian coordinate system |
| Amplitude data | Photo sensitivity of each pixel when the LED is emitted 16 bits (256 scales) |
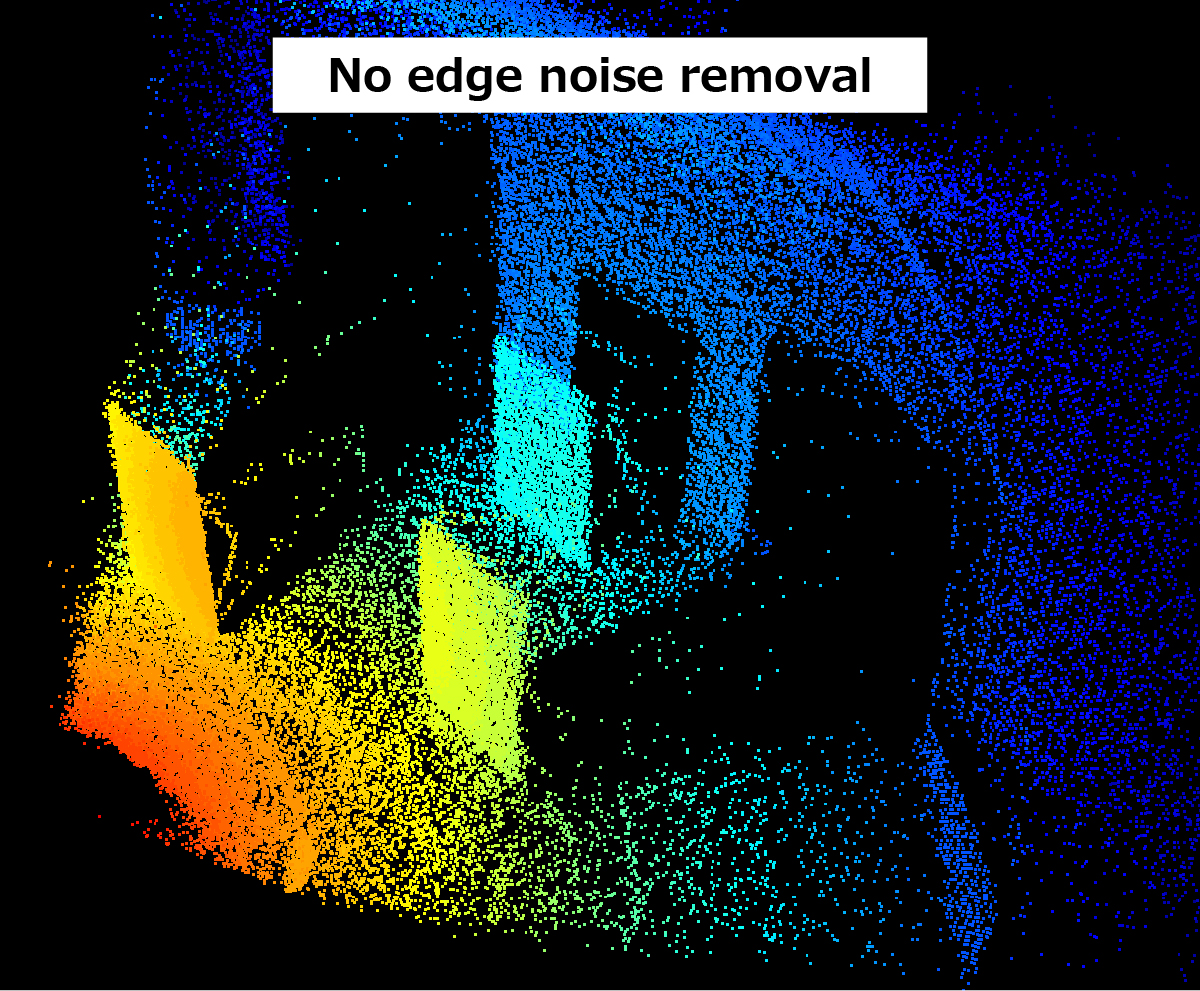
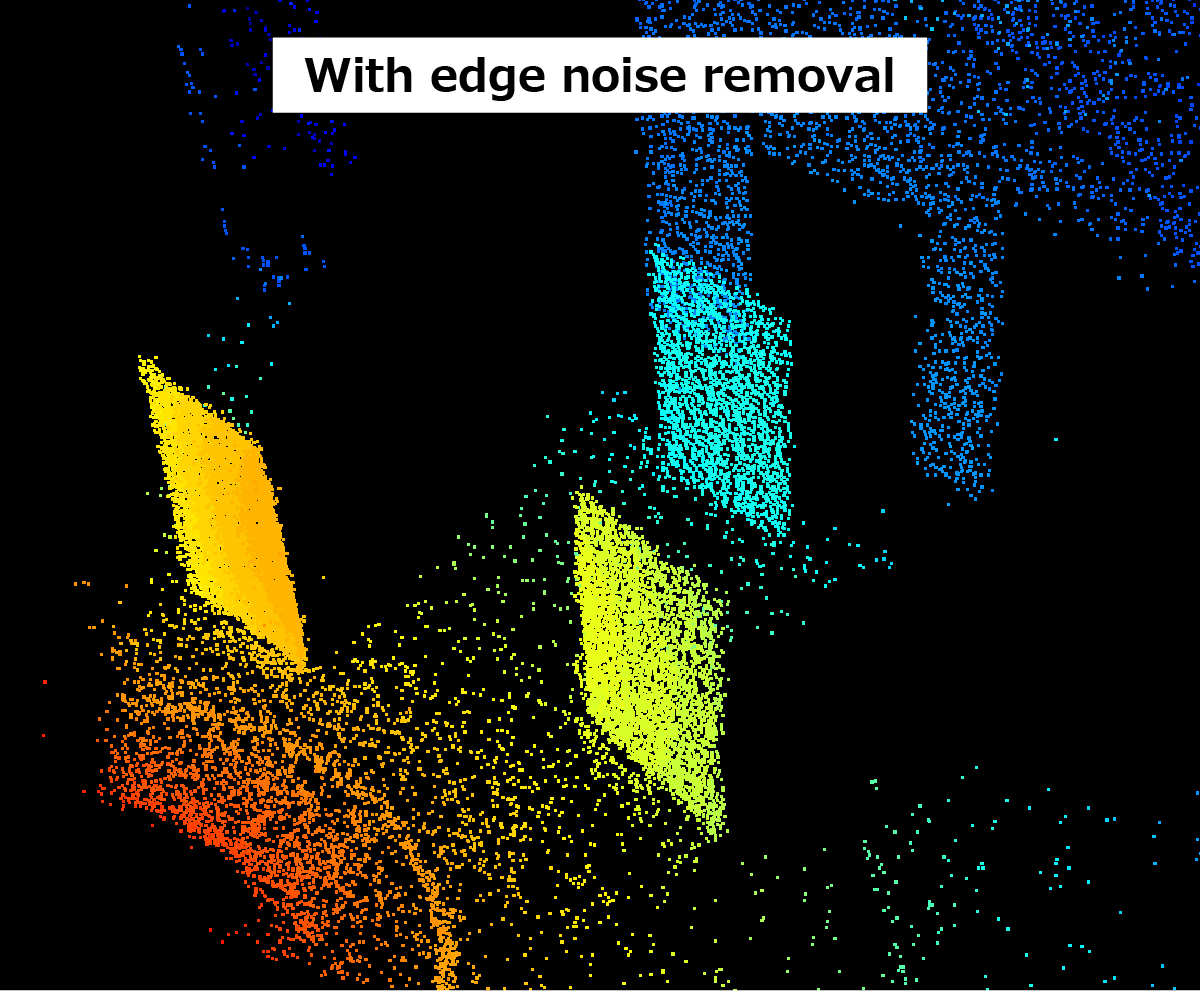
Edge Noise Reduction
-
-
When there is a distance difference between the object you want to detect and the background, the distance data around the object is an intermediate value of the distance from the background.
Therefore, the data around the detected object can be gathered.- Pixels with distance difference equal to or greater than the threshold value are determined as boundaries (edges). This function outputs the distance/amplitude value of the farther pixel as low amplitude (hidden).
- False detection rates increase when the pixel distance varies widely. Thus, lowering the threshold makes it easier for proper edge detection.
Buy or Contact
Order Information
| Detection principle |
Detection range (white paper) |
NIR transmission filter | Model | Minimum delivery unit |
|---|---|---|---|---|
| TOF |  |
Available (Built-in) | B5L-A2S-U01-010 | 1 pc |
Buy or Contact
You can select a store from the links below.
Please utilize the below if you have any questions or comments regarding this product.