制御IC「W2RF018WF」ブラシレスDCモータ
LINE UP


基礎知識
-
1ブラシレスDCモータの特徴
DCモータは直流電圧で駆動するモータで、「高速回転が可能」「起動トルクが大きい」という特徴があります。DCモータには「ブラシ付き」「ブラシレス」の2種類あります。
ブラシ付きDCモータは、内部でブラシ(電極)とコミュテータ(整流子)を接触させて、
機械的にコイル電流の方向を切り替えながら回転します。
ブラシレスDCモータはブラシ、コミュテータに替えて、スイッチング用トランジスタを使い、電気的にコイル電流の方向を切り替えます。
これにより、コイルは回転磁界を発生させます。
永久磁石を取付けたロータが、この回転磁界に同期して回転します。
ブラシ付DCモータと比べて、機械的な接触部分が無いため、寿命が長いことが特長です。
コイル電流の切替タイミングは、ロータの位置に基づいて決まります。
そのため、ロータに取り付けた永久磁石の磁極をホールセンサが検知してロータの位置を把握します。 -
2ブラシレスDCモータのフィードバック制御
ブラシレスDCモータはコイル電流の切り替えによって回転することから、
コイル印加電圧を調整することで速度制御を実現できます。
速度制御は次の①~⑤を繰返し行います。(ブロック図を参照)
- ①目標速度を設定
- ②現在速度をフィードバック
- ③目標値と現在速度を比較
- ④電圧生成部が比較量からモータコイルへの出力電圧を生成
- ⑤生成した電圧値をモータに印加

図1:ブラシレスDCモータ速度制御(概略) これにより、目標速度への加速、維持、減速が実現できます。
また、負荷トルクが変化して速度が変動した場合でも目標値に回復させることができます。 -
3駆動回路の必要性
実際の速度制御は下記のように行います。
- ①目標速度を設定
- ②モータ内蔵のホールICが、回転するロータの磁極変化をパルス信号に変換して出力
- ③速度変換部がホールICのパルス信号を現在速度に変換
- ④現在速度と目標値を比較する。
- ⑤電圧生成部がモータコイルに印加する電圧値を生成する。
- ⑥電圧制御部が電圧値を制御する。
- ⑦電圧がモータコイルに印加され、回転磁界を作る。
- ⑧モータが回転し、可動物が動く。
このうち、③~⑥の機能はソフトウェア、ハードウェアによる制御が必要なので、駆動回路が必要となります。
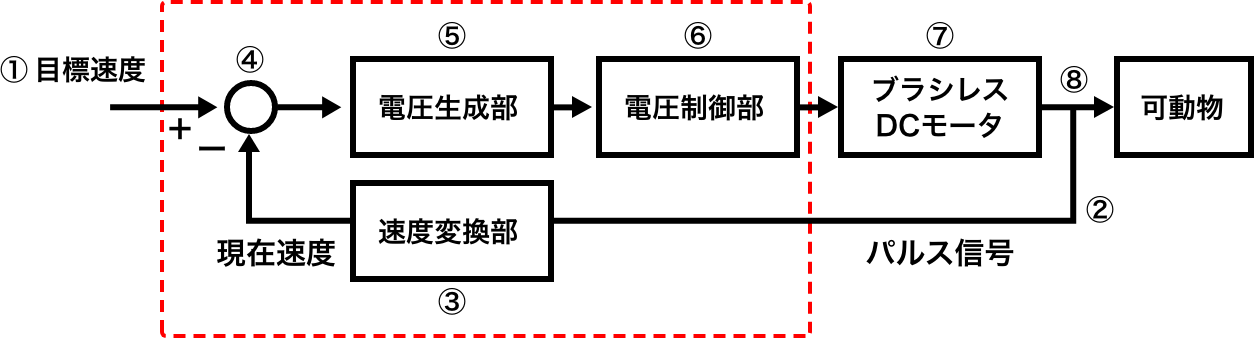
図2:ブラシレスDCモータ速度制御(点線内:駆動回路) -
4制御ICの機能
③~⑥の機能のうち、③~⑤はマイコンで実現することは可能ですが、マイコン負荷の増大というデメリットがあります。
そこで、これらの機能を1パッケージ化したブラシレスDCモータ制御ICが③~⑤の機能を果たします。
⑥はブラシレスDCモータドライバICで実現できます。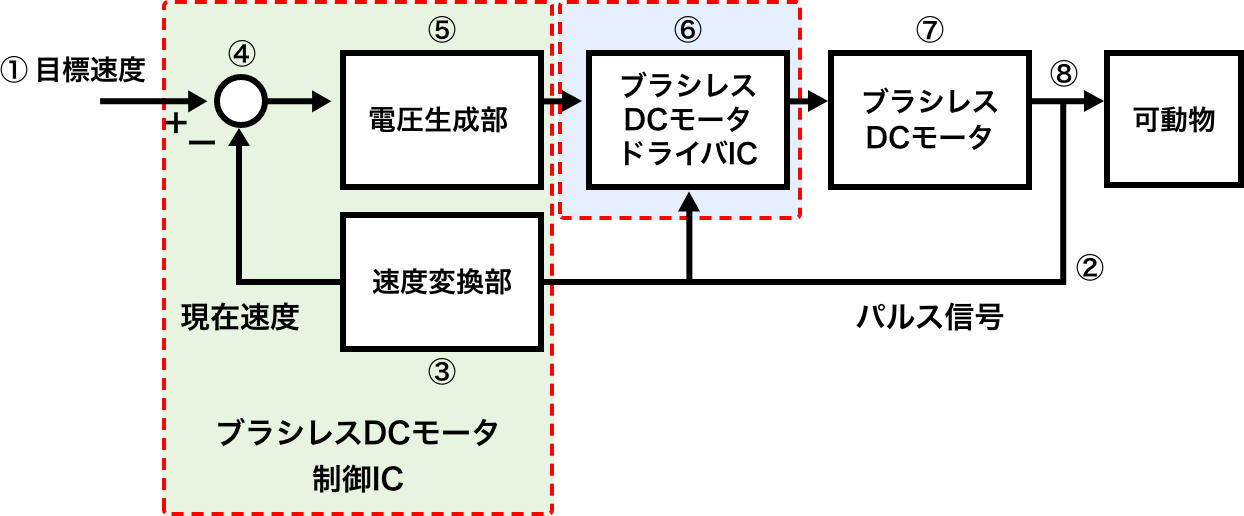
図3:ブラシレスDCモータ速度制御(実回路) -
5制御IC「W2RF018WF」の使い方と特徴
CPUから初期設定を行えば、目標となる速度、位置を送るだけでモータドライバICにPWMなどの信号を出力します。

特徴
- ①急加速、急停止が得意動作の中で、加速、停止を短時間で行い、かつ目標位置に正確に停止する制御を実現。
- ②様々な機構に対応ICに入力するパラメータを変えれば、重さ、形状の変化にも対応可能。
パラメータ値は、負荷解析レポートにて提示します。 - ③開発サポートツールを用意簡易開発キット、評価キットなどの開発環境ツールで、お客様の開発をサポートします。
参考動画
-

①性能編ブラシレスDCモータとステッピングモータ比較
-

②制御編プラシレスDCモータ制御について
-

③ツール編便利ツールで商品開発
サポート動画
-
1技術説明動画
技術者による説明動画です。制御の理解、開発環境ツールの使い方、負荷解析、使用上の注意点を分かり易く説明しています。
1.モータ制御の理解  テーマ 「ブラシレスDCモータの基礎・制御方法を学ぶ」
テーマ 「ブラシレスDCモータの基礎・制御方法を学ぶ」制御ICを使ったモータ制御を理解できます。
ステッピングモータとの比較、ブラシレスDCモータの特性についての説明しています。2-1.ツールを使って動かす
_簡易開発キット編 テーマ 「ツールを使ってブラシレスDCモータを動かす」前編
テーマ 「ツールを使ってブラシレスDCモータを動かす」前編1.提供ツールの説明
2.簡易ツールでの動かし方 について説明しています。2-2.ツールを使って動かす
_評価キット編 テーマ 「ツールを使ってブラシレスDCモータを動かす」後編
テーマ 「ツールを使ってブラシレスDCモータを動かす」後編3.EXCELツール+ダウンローダでの動かし方
4.ロガーによるログ取得方法
5.RPMモニタでの動作確認方法 について説明しています。3.負荷解析について  テーマ 「負荷解析依頼ができて、解析レポートが理解できる」
テーマ 「負荷解析依頼ができて、解析レポートが理解できる」負荷解析の目的、ヒアリングシート作成方法、ログデータのとり方、解析レポートの見方 について説明しています。
4.設計の注意点  テーマ 「ブラシレスDCモータ使用上の注意が理解できる」
テーマ 「ブラシレスDCモータ使用上の注意が理解できる」1.モータ本体の温度上昇、2.低速動作について
3.モータ出力軸に衝撃を加えない、4.行き過ぎ対策 について説明しています。 -
2レシピ動画 簡易開発キットの使い方
まずはモータを動かしてみたい人にお勧めの動画です。簡易開発キットの操作方法が分かる動画です。
1.接続方法 
簡易開発キットの”接続方法”をご紹介しています。
2.操作&表示の見方 
”操作パネル&表示の見方”についてご紹介しています。操作に必要な設定項目は、たったの5つ。
(DUTY、回転方向、回転距離、往復指定、繰り返し回数)ブラシレスDCモータを上手に使うための制御設定を、ディップSWで簡単に設定できるようになっています。
※速度制御は、DUTY指定。RPMモード無しです。3.上昇動作の設定 
”上昇する制御設定(+の回転)”についてご紹介しています。
※簡易開発キットに関しては、上昇と下降で変えることができるのは回転方向だけになります。かつ、上昇/下降かは機構(デモ機など)に依りますが、動画上のデモ機説明においては”上昇(+の回転)”として取り扱っています。4.下降動作の設定 
”下降する制御設定(-の回転)”についてご紹介しています。
※簡易開発キットに関しては、上昇と下降で変えることができるのは回転方向だけになります。 かつ、上昇/下降かは機構(デモ機など)に依りますが、動画上のデモ機説明においては”下降(-の回転)”として取り扱っています。5.往復動作の設定 
”往復の制御設定”についてご紹介しています。
簡易開発キットご利用の際の設定手順として、ご活用ください。 -
3レシピ動画 評価キットの使い方
制御設定を試してみたい方にお勧めの動画です。評価キットの接続方法と操作方法が分かる動画です。
1.接続方法 
評価キットの”接続方法”をご紹介しています。
2.演出作成シート 
モータの演出を作成するツールです。
時間、速度、位置など調整することでより細かな演出を作ることができます。3.LTMT_Downloader 
LTMT_Downloaderは、演出作成ツールで作成したcsvファイルを
演出制御基板に書き込むツールです。4.MotorDcLogger 
MotorDcLoggerは、モータを動かした際の「座標・速度・DUTY」のログを取得することができます。
5.rpmMonitor 
rpmMonitorは、MotorDcLoggerで取得したログをグラフ化するソフトです。
制御シリーズ
| 型式 | 用途 | ||
|---|---|---|---|
 |
W2RF018WF | ブラシレスDCモータ制御IC ・3相ブラシレス DC モータ2系統を制御可能 |
詳細 |
 |
W2RF027WN | 通信制御IC(I2C⇒SPI) I2Cシリアル通信をSPI通信に変換する通信変換IC ・I2Cシリアル通信のFast-mode Plus(1MHz)に対応 ・I2Cバスではスレーブとして動作し、SPI バスではマスタとして動作 |
詳細 |
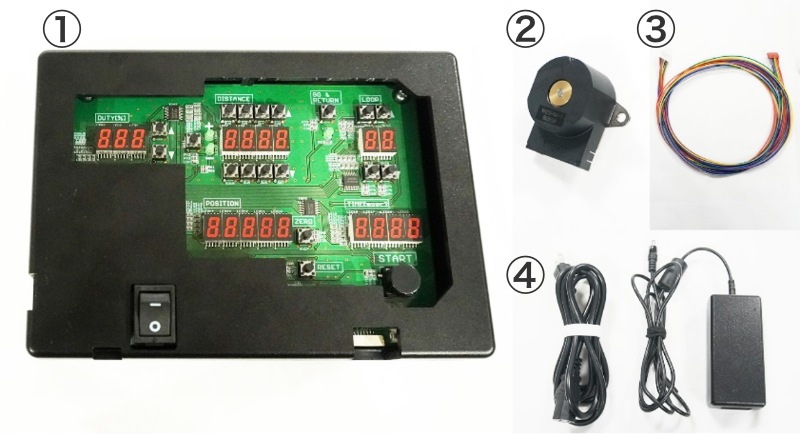
サンプルキットのご提供
実際に評価されたいお客様にサンプルキットをご提供しています。(無料)
-
①簡易開発キット
②BLDCモータ(1個)
③接続ハーネス(1本)
④電源アダプタ